Semi-supervised 3D object detection from point cloud aims to train a detector with a small number of labeled data
and a large number of unlabeled data. The core of existing methods lies in how to select high-quality pseudo-labels
using the designed quality evaluation criterion. However, these methods treat each pseudo bounding box as a whole
and assign equal importance to each side during training, which is detrimental to model performance due to many
sides having poor localization quality. Besides, existing methods filter out a large number of low-quality
pseudo-labels, which also contain some correct regression values that can help with model training. To address the
above issues, we propose a side-aware framework for semi-supervised 3D object detection consisting of three key
designs: a 3D bounding box parameterization method, an uncertainty estimation module, and a pseudo-label selection
strategy. These modules work together to explicitly estimate the localization quality of each side and assign
different levels of importance during the training phase. Extensive experiment results demonstrate that the proposed
method can consistently outperform baseline models under different scenes and evaluation criteria. Moreover, our
method achieves state-of-the-art performance on three datasets with different labeled ratios.
Video
Nesie
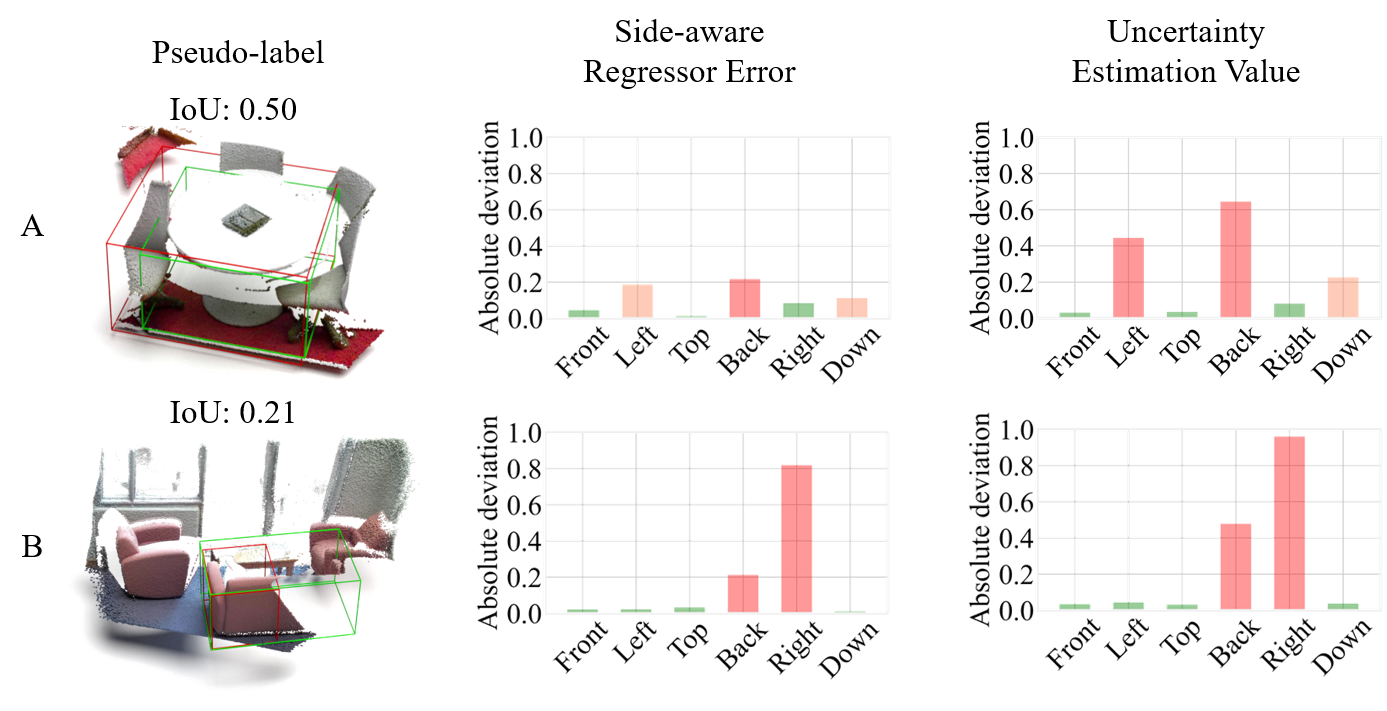
Previous pseudo-label based methods use global metric scores (IoU, classification confidence, and voting
score, et al.) to select pseudo-labels. Pseudo-labels with high global scores may not cover each side
well, while pseudo-labels with low global scores may provide correct predictions for some object sides. An
intuitive way is to estimate the localization quality of each side and treat different sides with
different importance for model training.
How to estimate the localization quality of each side?
(1). Decouple the localization task and predict the position of each side as a probability distribution.
(2). Propose a side-aware uncertainty estimation module to evaluate the quality of each side.
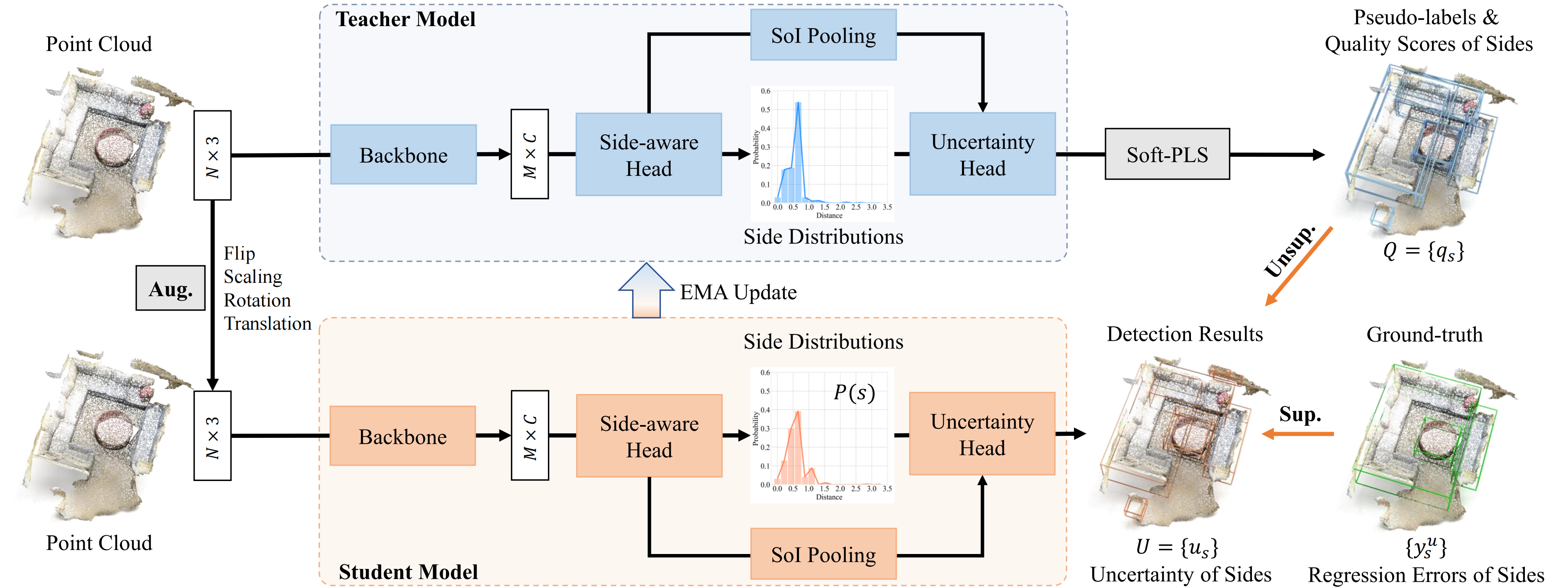
Framework
Our method is based on the mean-teacher framework. We start by augmenting the point cloud data and feeding it into
the student model to obtain both the detection result and the uncertainty of the sides. For labeled data, we
directly use the ground-truth to constrain the predicted results. For unlabeled data, we apply the soft-PLS method
to filter the predicted results of the teacher model to generate pseudo labels, which are used to supervise the
student model. To update the parameters of the teacher model, we employ the Exponential Moving Average (EMA)
strategy.
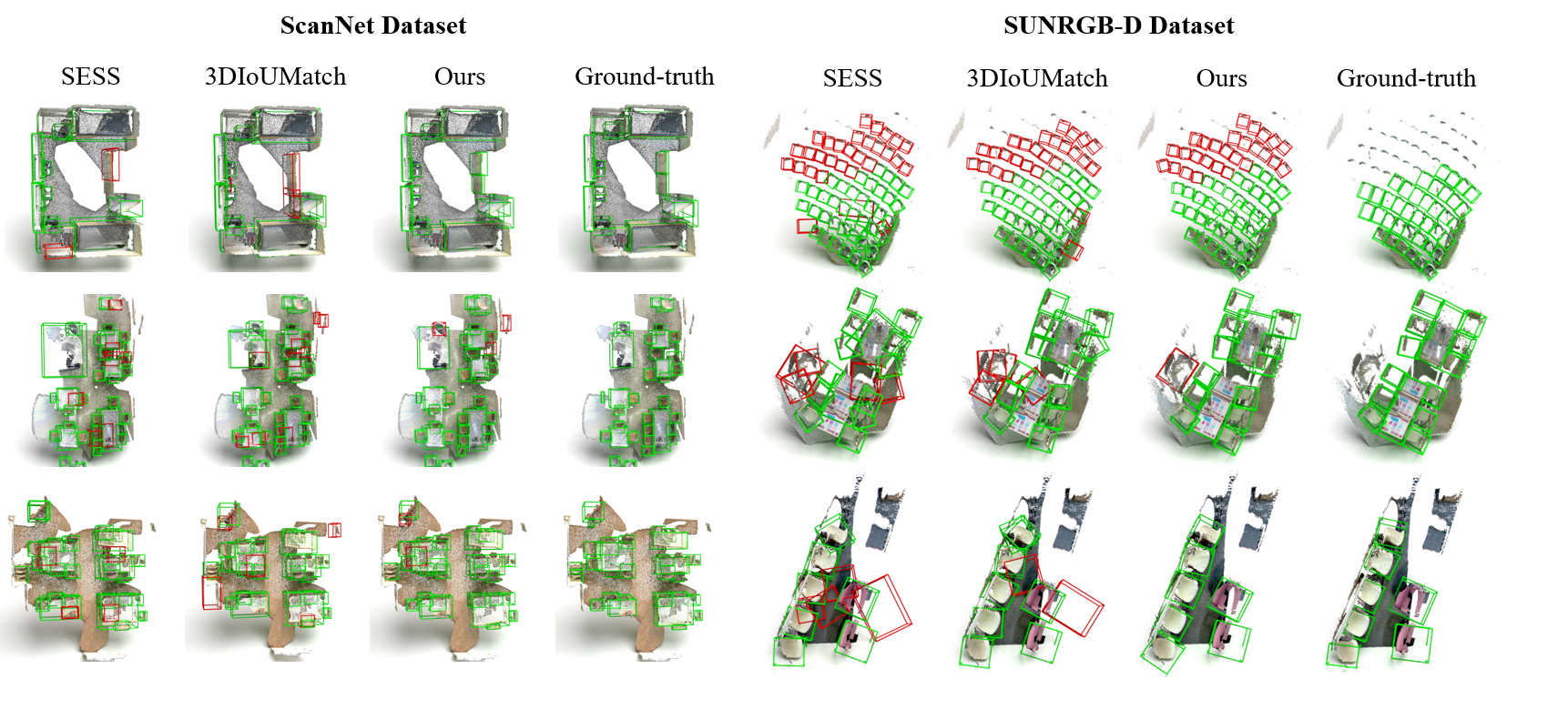
Results
Conclusion
(1) In this paper, we propose a side-aware framework with three specific designs: a probabilistic parameterization
method, an uncertainty estimation module, and a soft pseudo-label selection.
(2) To the best of our knowledge, our approach is the first to consider the quality of local sides for 3D
pseudo-label filtering, enabling full exploitation and utilization of valid information in the model prediction
results for supervising student models.
(3) Experiment results indicate that our method outperforms state-of-the-art methods on two indoor datasets and one
outdoor dataset.
Paper
Not Every Side Is Equal: Localization Uncertainty Estimation for Semi-Supervised 3D Object
Detection
ChuXin Wang, Wenfei Yang, Tianzhu Zhang
International Conference on Computer Vision 2023(ICCV), 2023